This is the system I currently use to drive my 350mm Dobson telescope.
All components are mounted on one prototype board (160 x 80 mm). The CPU is an Atmel AVR mega161.
Two Allegro SB3973 dual full bridge drivers control the bipolar motor currents.
The handbox is the same as for the first (modular) controller.
The microcontroller communicates with an old notebook PC via one of its serial ports.
The PC does all the coordinate transformations and gives the tracking and slew commands to the microcontroller.
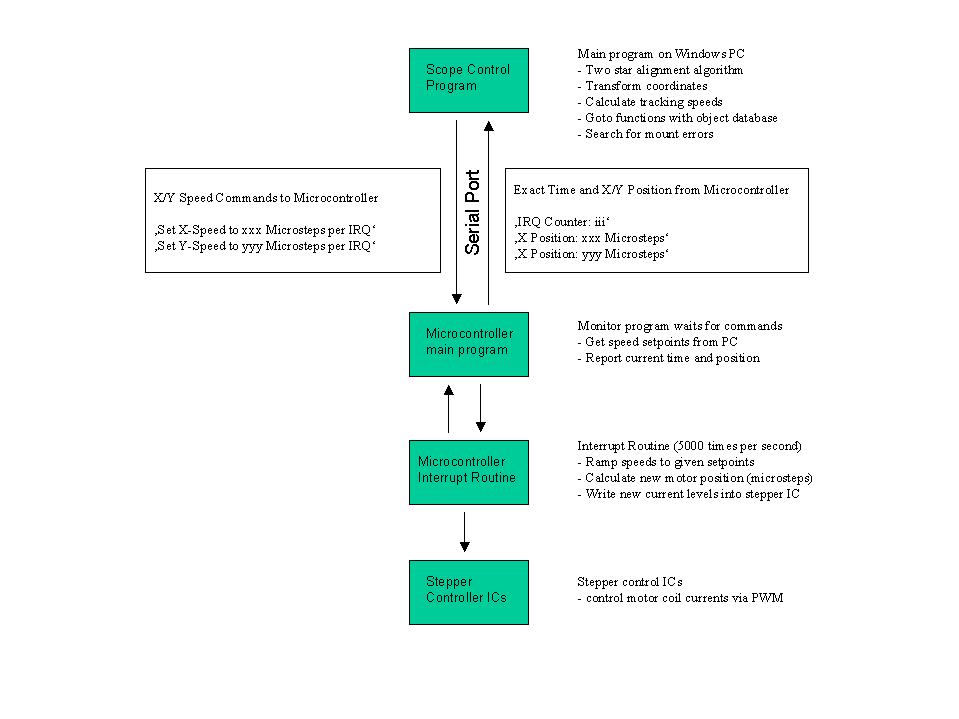
Cooperation of microcontroller and PC
Here the communication between PC and microcontroller is shown.
Five times a second the PC gets the current position (step counts of both motors) from the microcontroller.
The time ist taken from the PC's system clock instead of the microcontroller as shown in the picture.
All coordinate transforms are done in the PC. The program on the PC can handle some
object databases for alignment or slewing to objects.
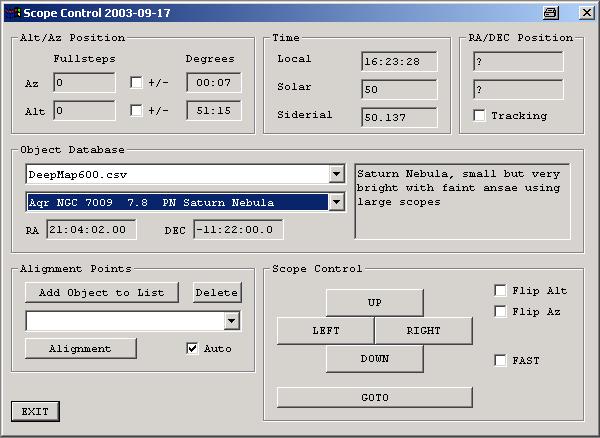
Program on the PC
Most program functions are controlled from one dialog.
I have to perform the following steps to align my scope:
1. Aim the scope to Polaris (or another object with known altitude)
2. Reset the controller by pressing all four direction keys simultaneously. Now its step counters start at zero.
3. Center the first object in the eyepiece.
4. Select the first object in the database.
5. Press the dialog button 'Add object to list'.
6. Search another object nearly 90 degrees away (should give best alignment accuracy) from the first.
7. Select the second object in the database.
8. Press the dialog button 'Add object to list'.
9. Press the dialog button 'Alignment'.
10. In the alignment dialog press the button 'Alignment'.
11. Check the 'Average Position Error' (in degrees). If necessary, adjust the start altitude
in the field 'Start Alt degrees' and repeat step 10.
12. Close the alignment dialog.
13. Select an object from the database for observing.
14. Press the dialog button 'goto'.
15. If no handbox button or switch is active the scope will slew to the object.
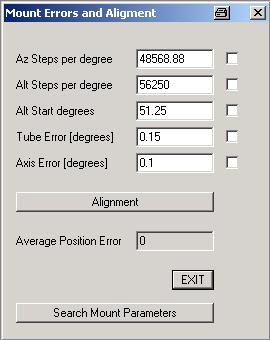
Alignment and mount errors
This is the dialog where the alignment on two or more reference objects is done.
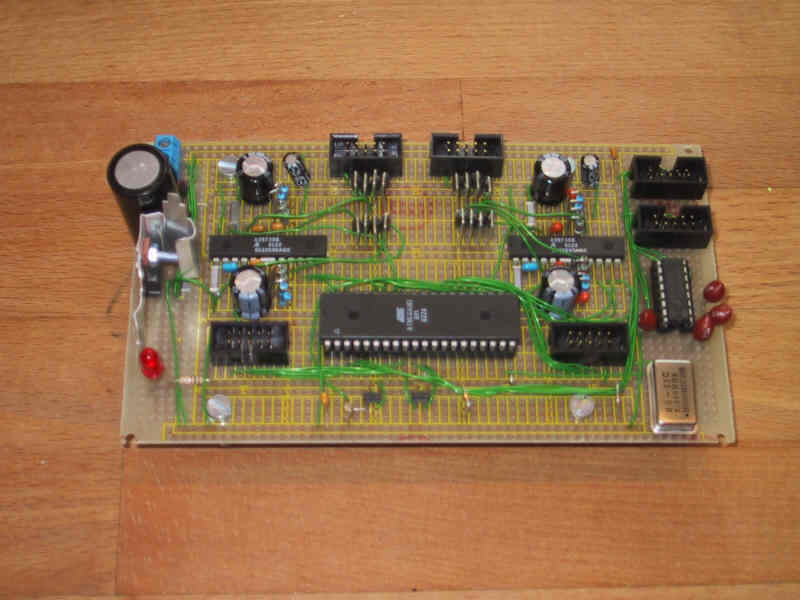
Controller board
This is the controller board.
Unfortunately I have no documentation or schematic beside the AVR/C++ sourcecode.
Send me an EMail if you are interested.